Біофізика і біомеханіка - В. С. Антонюк - 2012
Розділ 4. БІОФІЗИКА СКЛАДНИХ БІОЛОГІЧНИХ СИСТЕМ
4.1.Математичне моделювання складних біологічних систем
4.1.5. Механічне моделювання опорно-рухового апарата
Використовувати в технічних рішеннях те, що вже створено природою, - завдання дослідників. За мільйони років еволюції живі організми знайшли такі унікальні вирішення різних технічних завдань, що у них просто варто повчитися інженерам та конструкторам.
Оскільки автоматизація сучасного виробництва припускає використання роботів та маніпуляторів, що імітують роботу людських рук та деяких рухів його тіла, тоді механіка людини стає актуальним напрямом технічних досліджень. Вважається, що для побудови теорії рухів людини необхідно синтезувати поняття волі людини і трьох основних законів механіки. І хоча результати часто виходять наближеними, вони все ж таки дають уявлення про можливість практичного використання моделей в робототехніці. Удається, наприклад, побудувати грубу теорію рухів піаніста під час гри.
Динамічні моделі опорно-рухового апарата як людини, так і тварин належать до класу механічних систем, до яких прикладені закони класичної механіки. Як математичний апарат використовують рівняння Лагранжа другого роду, їх кількість у системі рівнянь збільшується у міру зростання степенів вільності, що використовують для вибраної імітаційної моделі. Динамічні характеристики людини під час її просторового руху дослідники намагалися визначити ще кілька століть назад. Не втратила своєї актуальності вона й дотепер, хоча багато важливих результатів уже успішно застосовують на практиці. Наприклад, були визначені сили і моменти суглобів опорно-рухової системи. Ці зусилля є основними динамічними величинами, які характеризують керування, що здійснюється центральною нервовою системою.
Дослідження зазвичай проводять на спрощеній моделі, одну з яких зображено на рис. 4.8. Вона складена з елементів реології і використовується для вивчення дії на організм зовнішніх динамічних навантажень. Сидяче або стояче положення визначається робочим місцем, а періодична сила характеризує вплив вібрації, яка неминуча у виробничих умовах.
Цікаво відзначити [83], що біологічні системи адаптуються до вертикальних коливань так, щоб власна частота коливань біологічної системи сильно відрізнялася від частоти збурення. Цим унеможливлюється виникнення резонансних явищ (які швидко наростають за амплітудою коливань).
Маніпулятори, що імітують рух рук людини під час виконання заданих операцій, контролюються відслідковувальною системою «око-рука». На виробництві часто виявляються необхідними маніпулятори більш гнучкі, ніж рука людини. Наприклад, маніпулятор з декількома «ліктьовими» та «плечовими» суглобами схожий швидше на хобот слона, ніж на руку людини. І навіть за меншого степеня вільності порівняно з людською рукою цей маніпулятор у ряді випадків виявляється зручнішим: він може, наприклад, досягти місця виконання роботи через технологічні люки. Такому роботу немає потреби мати тулуб і голову, схожі на людські. Для виконання роботи придатнішими виявляються «очі» (відео- датчики), розміщені на маніпуляторі, а не на голові.
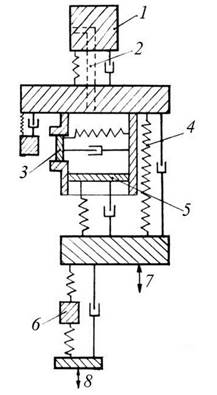
Рис. 4.8. Кінематично- реологічна модель опорно- рухового апарата людини:
1 - голова; 2 - трахея; 3 - стінка грудної клітки; 4 - хребетний стовп;
5 - черевна порожнина; 6 - ноги; 7 - періодична сила від динамічного навантаження сидячої людини; 8 - періодична сила від динамічного навантаження людини у стоячому положенні
Інтерес становлять не лише маніпулятори «руки», але й «ноги». До речі, перший такий пристрій - машина, що ходить, - була сконструйована відомим російським ученим-механіком П. Л. Чебишевим.
На пересіченій місцевості машини, що ходять, виявляються набагато зручнішими за колеса. Принцип їх дії зрозумілий, якщо простежити за переміщенням по траві павука на довгих кінцівках. Завдяки таким кінцівкам під час руху тулуб павука не випробовує коливань. Автономна робота кожної кінцівки залежно від точки опори дозволяє утримувати тулуб на одному рівні. Також без коливань і розгойдувань рухатиметься на спеціальних «кінцівках» планетохід, крокуючий через тріщини, по валунах і нерівностях поверхні планети. Така машина - результат сумісних зусиль біомеханіки та біоніки.